Roboticists have made significant strides in designing versatile robotic grippers capable of handling a wide range of objects. While many grippers are inspired by the dexterity of human hands, some advanced designs come with complex mechanisms and sophisticated programming requirements. This can hinder their widespread adoption in the development of energy-efficient and cost-effective robots. However, researchers at Purdue University and MIT have recently unveiled a simpler yet highly effective robotic gripper that bridges the gap between conventional high-DOF hands and traditional one-DOF grippers.
The newly developed gripper features 5 degrees of freedom (DOF), making it a versatile tool for in-hand manipulation tasks. Unlike complex humanoid hands, this gripper’s simple design allows for easier programming and control. Each finger of the gripper is equipped with a linear actuator and a rotational servo motor, enabling precise movements for grasping and manipulation. Additionally, a vision-based tactile sensor mounted on one of the fingers provides crucial sensory data about the objects being handled.
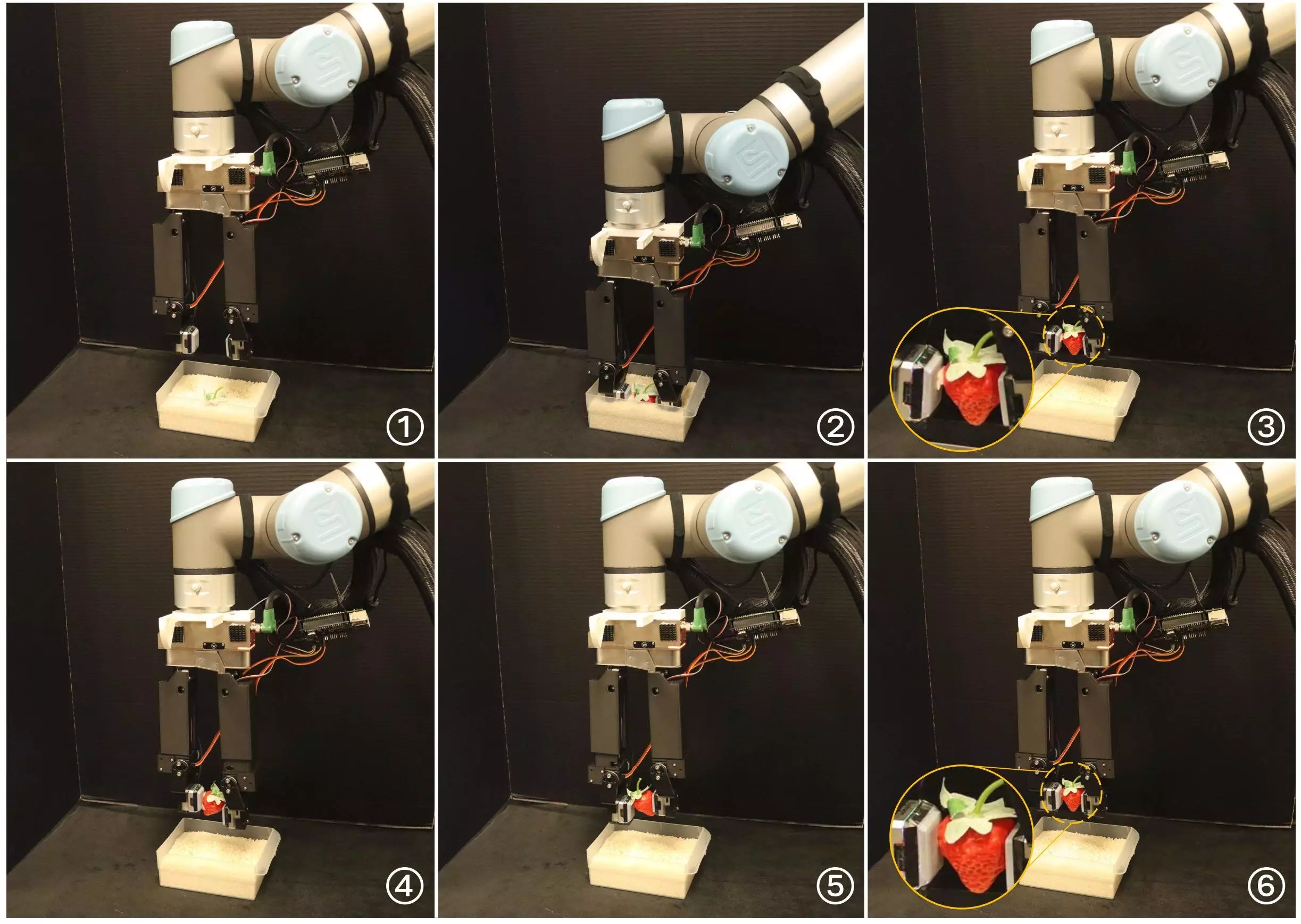
Despite having fewer DOF than traditional humanoid hands, this gripper exhibits remarkable dexterity in various real-world tasks. In initial experiments, the gripper successfully completed tasks such as singulation and scooping, challenging maneuvers that require intricate manipulation skills. By combining its 5 DOF, the gripper can mimic human-like actions, showcasing its potential for handling complex objects with ease.
One of the key advantages of this gripper is its simplicity in both design and operation. By reducing the complexity of the gripper’s mechanisms, the researchers aim to streamline the controller design and improve the overall efficiency of robotic solutions. This approach not only enhances the gripper’s performance but also makes it a cost-effective and energy-efficient tool for various applications.
Looking ahead, the research team plans to further enhance the gripper’s capabilities and apply it to more challenging manipulation tasks. The success of this tactile gripper opens up possibilities for developing similar robotic systems that prioritize functionality, cost-effectiveness, and ease of maintenance. By leveraging the advancements in tactile sensing technology, future robotic grippers could revolutionize the field of object manipulation and automation.
The development of a simple yet highly effective robotic gripper by researchers at Purdue University and MIT marks a significant milestone in the field of robotics. By balancing the number of DOF with practicality and performance, this gripper represents a promising solution for achieving complex manipulation tasks with ease. As the technology continues to evolve, we can expect to see more innovative grippers that redefine the standards for cost-effective and efficient robotic systems.
Leave a Reply