When humans interact with their environment, they often do so effortlessly, unconsciously navigating around obstacles with a fluidity that seems innate. For instance, the simple act of retrieving a book from a shelf is a task most individuals can perform without a second thought. However, this seemingly straightforward process conceals the intricate workings of the human brain, which constantly analyzes its surroundings, plans movements, and adjusts in real-time. This complexity presents a formidable challenge for robotics researchers who strive to replicate human-like motion in machines, particularly when devising methods for effective object handling. The Carnegie Mellon University’s Robotics Institute (RI) is making significant strides in this area with the introduction of Neural Motion Planning—a concept that could redefine robotics’ adaptability to unpredictable environments.
Motion planning in robotics involves a detailed process where machines must navigate from one point to another while avoiding obstacles. This task becomes exponentially more challenging when the environment is unfamiliar or contains unpredictable elements. Traditional methods often rely on extensive calculations that check for possible collisions at every potential movement, a process that can be prohibitively slow and inefficient. Murtaza Dalal, a doctoral student at RI, emphasizes that conventional algorithms can falter when tasked with operating in unstructured settings—scenarios where prior knowledge of the environment is absent.
This limitation of classic motion planning motivates researchers to seek innovative solutions that better mimic human adaptability. The solution proposed by the research team at Carnegie Mellon incorporates a data-driven approach that leverages artificial intelligence (AI) to enhance how robots respond and maneuver within diverse household environments such as kitchens, living rooms, and unpredictable clutter spaces.
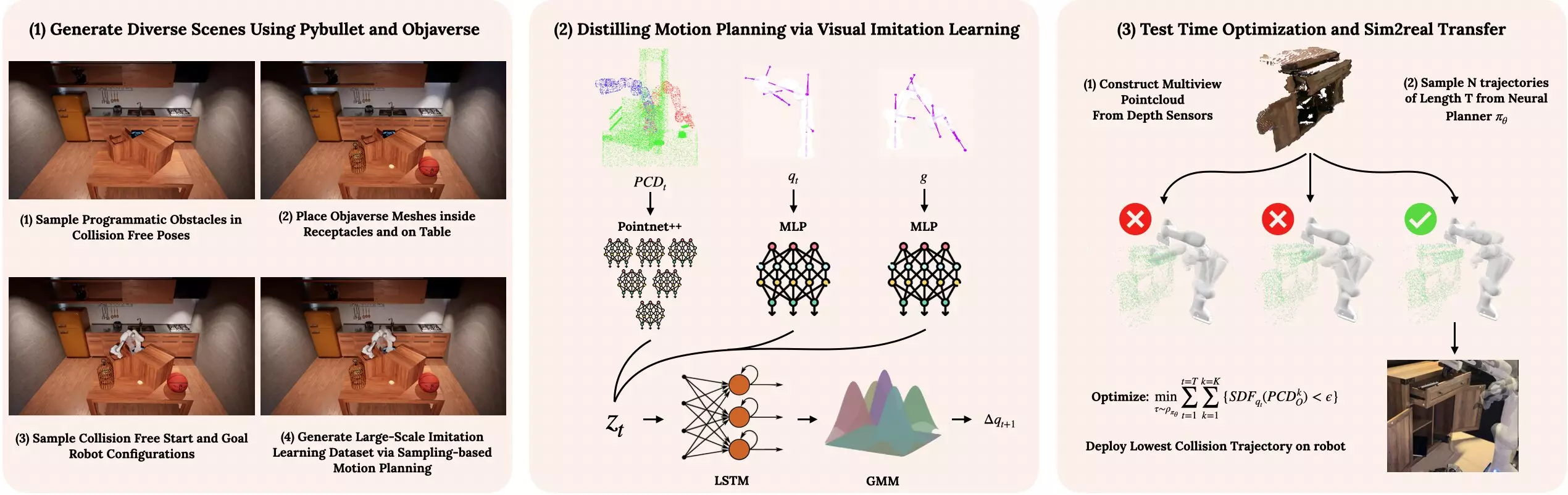
The design of Neural Motion Planning is deeply rooted in a model analogous to human learning behaviors. Humans typically begin acquiring new motor skills through tentative and cautious actions, gradually refining these movements into more confident and dynamic motions. The neural model devised by the Carnegie Mellon team draws parallels to this learning curve: it utilizes simulations to expose the robotic system to a multitude of household scenarios, efficiently training it to recognize and react to obstacles, be it a mislaid object or even a playful pet.
During their experiments, researchers generated millions of complex scenarios in a simulated setting. Robots were faced with dynamic environments filled with real-world objects — from kitchen gadgets to home décor. This extensive training enabled the neural models to enhance their ability not only to move objects effectively but also to exhibit rapid reactions to unforeseen challenges, much like a human would.
Implications for Real-World Robotics
The practical applications of Neural Motion Planning extend into a wide array of fields including service robotics and autonomous transportation systems. As Deepak Pathak, a professor at RI, notes, the field has achieved remarkable advancements in the realms of computer vision and natural language processing, evidenced by technologies like ChatGPT. However, robotics has lagged behind, primarily due to its unique challenges in dynamic environments. The introduction of Neural Motion Planning marks a significant step toward bridging this gap.
When applied to a robotic arm in laboratory settings, the model has demonstrated remarkable proficiency in navigating unfamiliar environments. Utilizing depth cameras to develop three-dimensional representations of its surroundings, the robotic system can determine its starting point and a target endpoint seamlessly. Neural Motion Planning then calculates the necessary configurations to facilitate the arm’s movement without colliding with obstacles such as furniture or kitchenware.
Looking Ahead: The Future of Robotics
The future of robotics appears promising with the integration of advanced models like Neural Motion Planning. As we challenge machines to replicate nuanced human behaviors, the potential for real-world applications grows exponentially. The ability of robots to adapt to various situations without extensive retraining signifies a monumental step forward in making robots more human-like in their physical interactions. As researchers continue to refine these technologies, we may soon witness a transformation in how robots assist in our daily lives, emphasizing a balance of efficiency and adaptability that has long been sought after in the field of robotics.
Leave a Reply