In the world of robotics, small robots have gained significant importance in recent years. These miniature machines are designed specifically for exploring and investigating small spaces that larger robots cannot access. Their ability to navigate around obstacles and their mobility in tight spaces make them ideal for tasks such as inspecting machinery or searching through rubble in disaster scenarios. However, building small robots that can steer themselves and carry their own power sources poses several challenges. In a groundbreaking development, a team of researchers led by Aaron Johnson and Sarah Bergbreiter has revolutionized the field by creating “Mugatu,” the first steerable bipedal robot powered by a single motor.
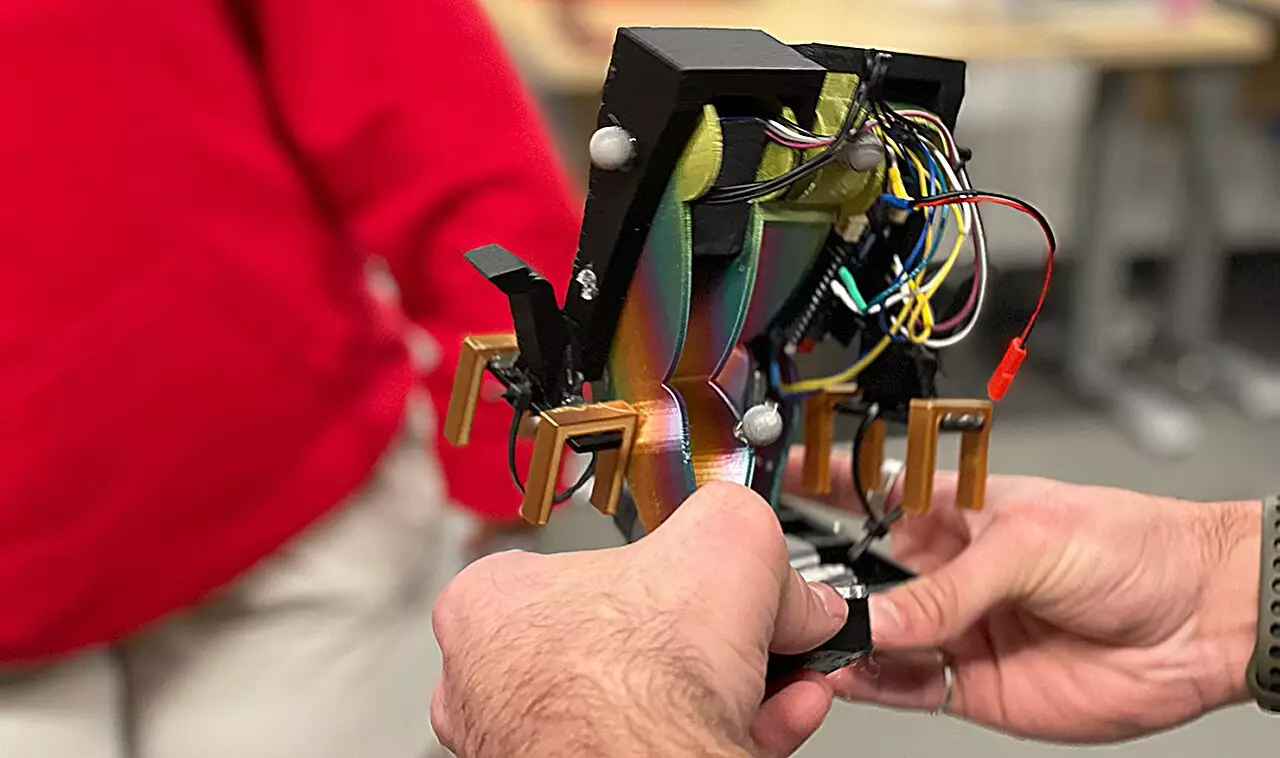
Mugatu, a self-contained and self-starting robot, represents a significant advancement in small robot technology. Unlike traditional small robots, Mugatu is capable of controlled left, right, and straight steering. This is achieved through a simple walker design that utilizes two rigid bodies and only one actuator. The team’s primary goal was to simplify the walking mechanism as much as possible, which has far-reaching implications for future robot designs. By understanding how scaling affects locomotion, these findings can be applied to scale existing robots up or down to fit through smaller spaces or carry heavier loads.
The success of the Mugatu project stems from the collaborative efforts of a diverse and talented team. James Kyle, a recent graduate in mechanical engineering, played a crucial role in simplifying the walker design. His expertise and understanding of scaling locomotion were instrumental in developing the robot’s unique capabilities. Additionally, Kendall Hart, an undergraduate mechanical engineering student, focused on implementing the current sensor, a vital component for calculating the energy usage of the robot.
Working on the Mugatu project provided Hart with an opportunity to apply her knowledge of MATLAB, a programming and numeric computing platform. Debugging the current sensor proved to be a challenge, but it also enhanced her confidence in independent problem-solving. The team’s passion and dedication to pushing the boundaries of robotics have been pivotal in the project’s success.
The Mugatu project’s long-term vision, playfully nicknamed “The LEGO Project,” is to downsize these robots to the size of a LEGO. Aiming for such miniaturization poses significant hurdles, as mechanics and dynamics drastically change when scaling down. However, the potential impact of achieving this goal is immense. Highly efficient small robots that can rival the capabilities of larger counterparts would open up new possibilities in various fields, including search and rescue missions, exploration in hazardous environments, and medical applications.
The development of Mugatu, the first steerable bipedal robot powered by a single motor, represents a remarkable advancement in small robot technology. This groundbreaking achievement by Aaron Johnson, Sarah Bergbreiter, and their team of researchers has simplified the walking mechanism, paving the way for highly efficient small robots. The collaborative efforts and unique skills of individuals like James Kyle and Kendall Hart have been crucial in realizing this goal. As the Mugatu project progresses towards downsizing the robots to the size of a LEGO, the possibilities for innovative applications expand. The future of small robot technology is full of potential, and these advancements will undoubtedly have a significant impact on a multitude of industries and sectors.
Leave a Reply