The field of robotics has seen a significant advancement with the introduction of imitation learning frameworks, which aim to teach robots how to perform various tasks by mimicking human demonstrations. One key aspect of such frameworks is the use of teleoperated systems to collect detailed human demonstrations. However, existing teleoperation systems have struggled to effectively process and reproduce complex movements performed by humans. Researchers at the University of California, San Diego recently developed Bunny-VisionPro, a system that addresses these challenges and enables the teleoperation of robotic systems for bimanual dexterous manipulation tasks.
The primary objective of the work by Xiaolong Wang and his colleagues was to create a teleoperation system that could generalize well across different types of robots and tasks, simplifying the collection of human demonstrations for training robotics control algorithms. Bunny-VisionPro is described as an innovative bimanual dexterous teleoperation system that allows human operators to control dual robot arms and multi-fingered hands in real-time. The system was designed to provide high-quality demonstration collection for imitation learning, making the teleoperation process intuitive and immersive.
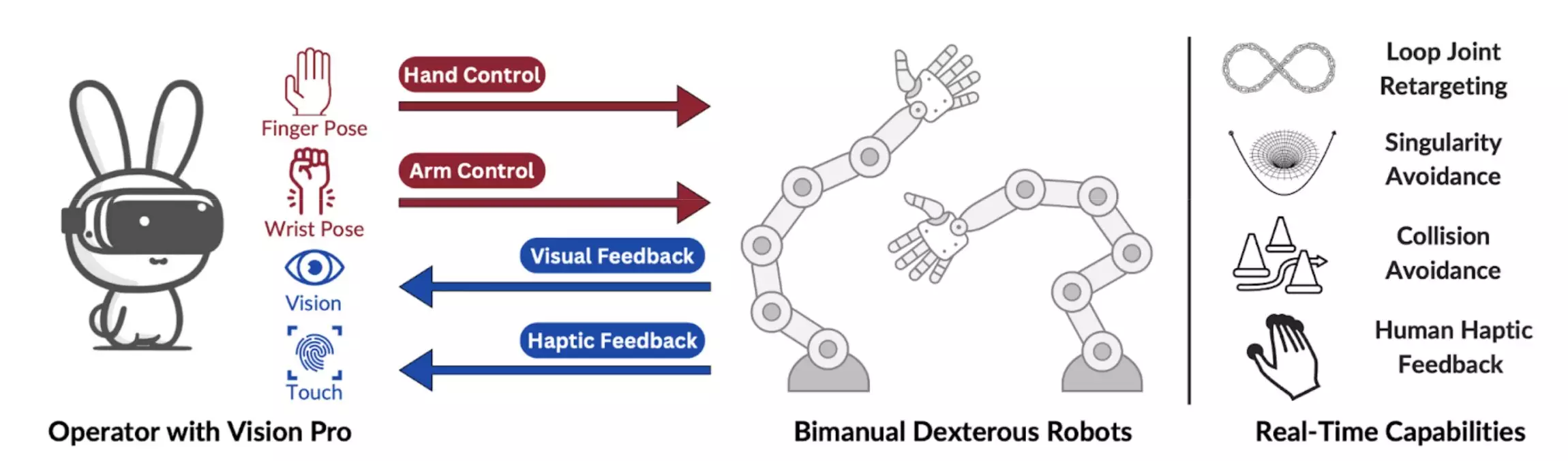
Bunny-VisionPro consists of three key components: an arm motion control module, a hand and motion retargeting module, and a haptic feedback module. These components work together to enable the safe control of a robotic manipulator in real-time while preventing collisions with nearby objects. The system also offers visual and haptic feedback to users, enhancing their teleoperation experience. Additionally, Bunny-VisionPro is portable, lightweight, and easy to install in laboratory settings, making it a promising solution for collecting demonstrations in robotics labs.
One of the main advantages of Bunny-VisionPro is its ability to balance safety and performance in real-time bimanual teleoperation. Unlike previous solutions, Bunny-VisionPro integrates haptics and visual feedback, which improves the teleoperation success rates and enhances the immersive experience for users. This system allows for control of robot arms and hands with minimal delay, incorporating collision avoidance and singularity handling to ensure reliability in real-world applications.
Future Implications of Bunny-VisionPro
The development of Bunny-VisionPro opens up new possibilities for using teleoperation to collect demonstrations for imitation learning frameworks. This system could be deployed in robotics labs worldwide, inspiring the development of similar immersive teleoperation systems. In future studies, the researchers plan to enhance manipulation capabilities by leveraging the robot’s tactile information for better precision and adaptability. This ongoing research could further advance the field of teleoperated systems in robotics, leading to more sophisticated and reliable robotic control algorithms.
The development of Bunny-VisionPro represents a significant step forward in the field of teleoperated systems for robotics. This innovative system not only simplifies the collection of human demonstrations for imitation learning but also enhances the teleoperation experience for users. With its portable design, real-time control capabilities, and integration of visual and haptic feedback, Bunny-VisionPro has the potential to revolutionize the way robots are trained to perform complex tasks. As research in this area continues to evolve, we can expect to see even greater advancements in teleoperation technology and its applications in robotics.
Leave a Reply