Robotic systems have significantly impacted various industries by assisting humans in warehouses, airports, malls, and offices. However, the future of robotics lies in the deployment of robots in unknown and unmapped environments. These environments pose unique challenges, such as occlusion of sensors by obstacles, increasing the risk of collisions. Air-ground robots have the potential to navigate outdoor settings efficiently and tackle complex tasks that were once deemed difficult for traditional robots.
Researchers at the University of Hong Kong have recently introduced AGRNav, a novel framework aimed at enhancing the autonomous navigation of air-ground robots in occlusion-prone environments. This framework consists of two main components: a lightweight semantic scene completion network (SCONet) and a hierarchical path planner. The SCONet component predicts the distribution of obstacles in the environment using deep learning, while the path planner utilizes this information to plan optimal and energy-efficient paths for the robot to reach its destination.
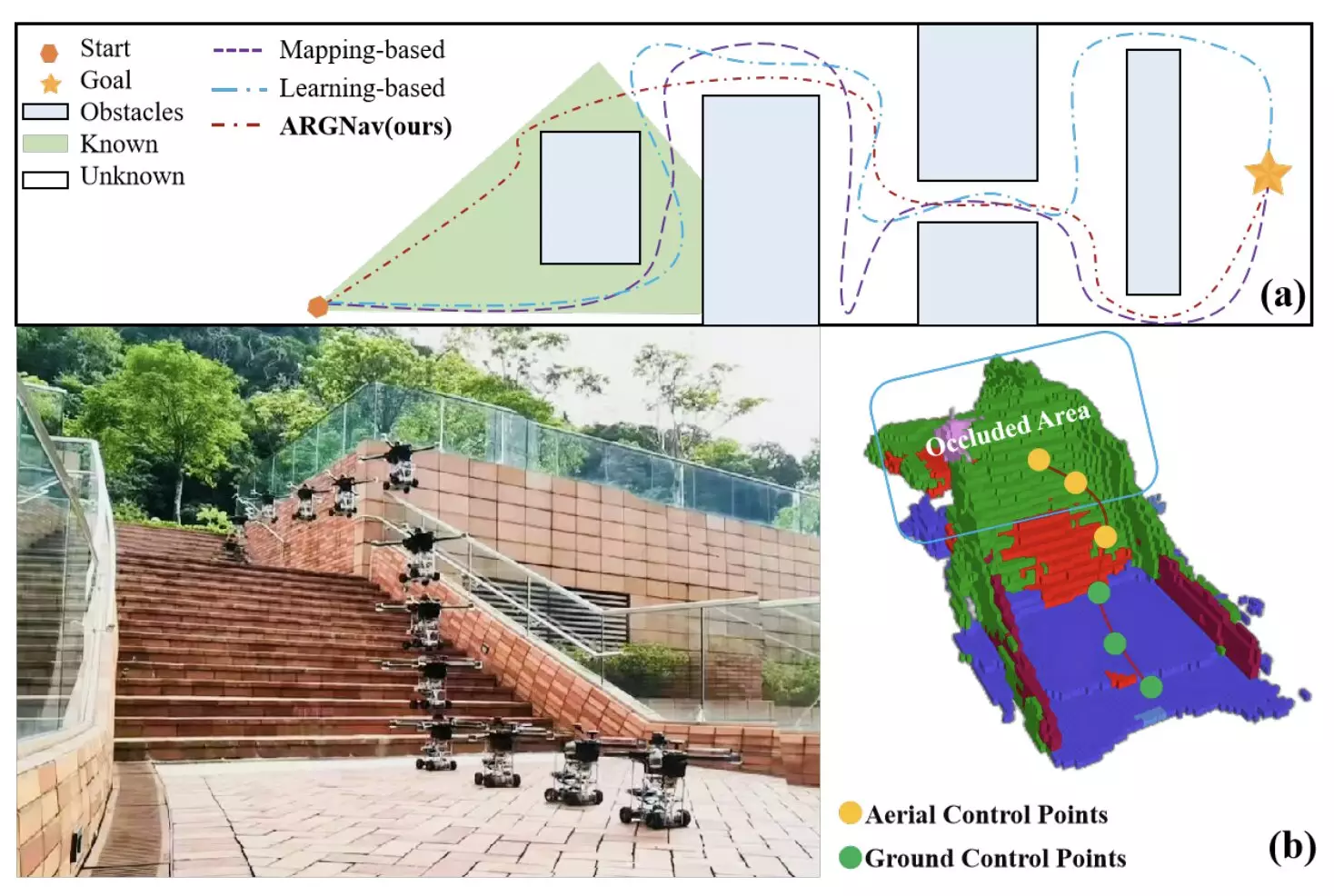
In complex environments such as forests and large buildings, air-ground robots face challenges due to occluded and unknown regions. Existing mapping-based and learning-based navigation methods often result in suboptimal trajectories for robots. AGRNav addresses this issue by accurately predicting unobserved obstacles and utilizing a query-based method for low-latency updates to the grid map, resulting in efficient navigation in complex environments.
Evaluating AGRNav in Simulations and Real-World Environments
The researchers conducted thorough evaluations of AGRNav in both simulations and real-world experiments, utilizing a customized air-ground robot for testing. The results revealed that AGRNav outperformed all baseline and state-of-the-art robot navigation frameworks, identifying optimal and energy-efficient paths for the robot. The open-source nature of AGRNav’s underlying code also allows developers worldwide to access and utilize the framework for their robotic platforms.
The successful implementation of AGRNav paves the way for the effective deployment of air-ground robotic systems in real-world environments. With the potential to search for survivors after natural disasters, deliver packages to remote locations, and monitor natural environments, air-ground robots equipped with advanced navigation frameworks like AGRNav have the capability to revolutionize various industries and applications. The continuous development and testing of such frameworks will further enhance the efficiency and effectiveness of robotic systems in navigating complex environments.
Leave a Reply